
重载AGV电平车控制系统
(Automated Guided Vehicle,简称 AGV),通常也称为 AGV 小车, 指装备有电磁或光学、惯性导航等自动导引装置,能够沿规定的导引 路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不 需驾驶员的搬运车,以可充电之蓄电池为其动力来源。…[了解更多]
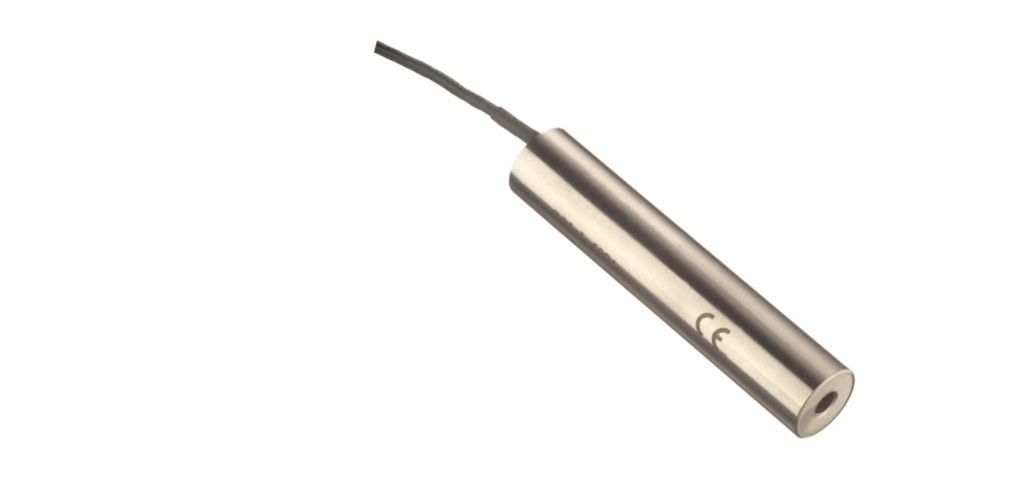
线性可变差动变压器LVDT介绍
什么是 LVDT?LVDT 是线性可变差动变压器的缩写。它是一种常见类型的机电传感器,可将其以机械方式耦合的物体的直线运动转换为对应的电气信号。LVDT 线性位移传感器即插即用,可以测量各种移动,从小到百万分之一英寸到几英寸,甚至大到 ±30 英寸(±0.762 米)的位移。图 1 显示了典型的 LVDT 元件。该变压…[了解更多]


MEMS传感器的应用
MEMS传感器作为获取信息的关键器件,对各种传感装置的微型化起着巨大的推动作用,已在太空卫星、运载火箭、航空航天设备、飞机、各种车辆、生特医学及消费电子产品等领域中得到了广泛的应用。…[了解更多]




我国传感器市场2016年现状:传感器成自
随着我国对智能化仪表设备的需求不断提升,促使工业传感器也在不断突破,智能传感器已经成为了21世纪最具有影响力的高新技术。近日,我国首个传感器产业园的建成,也推动我国未来传感器的发展。据资料预测,到2030年,全球传感器数量将突破100万亿个,未来,工业传感器将成为自动化仪表生产重点。…[了解更多]

TE Connectivity总裁Ter…
瑞士沙夫豪森---2016年10月3日—全球连接与传感领域领军企业 TE Connectivity董事会今天宣布自2017年3月9日起Terrence Curtin将接替Tom Lynch任公司首席执行官。Curtin目前任TE 总裁,并在2016年3月2日TE 年度股东大会上入选TE 董事会成员。…[了解更多]